ĄV▄ć═©│Żė╔ÖC▄ćĀ┐ę²Ż¼▀\ąąė┌šŁ▄ēų«╔ŽŻ¼╦³┐╔ęįėąą¦Ąžīó╦∙ķ_▓╔ĄV╩»╝░ĒĘ╩»▀\▌öĄĮųĖČ©╬╗ų├Ż¼╩Ūę╗ĘNā×┴╝Ą─Ž’Ą└╝░Š«Ž┬▀\▌öįOéõĪŻ░┤ŲõĮYśŗ║═ąČ▌dĘĮ╩Į▓╗═¼Ż¼ĄV▄ć┐╔Ęų×ķå╬é╚Ū·▄ēé╚ąČ╩ĮĄV▄ćĪó╣╠Č©╩ĮĄV▄ćĪóĘŁČĘ╩ĮĄV▄ćĪóĄūŻ©é╚Ż®ąČ╩ĮĄV▄ć║═╦¾╩ĮĄV▄ć5┤¾ŅÉĪŻŲõųąŻ¼å╬é╚Ū·▄ēé╚ąČ╩ĮĄV▄ć╩Ū╩╣ė├ŅlĘ▒Ą─ę╗ĘNĄV╔Į▀\▌öįOéõŻ¼Ųõ╠ž³c╩ŪÖCśŗÅ═ļsŻ¼ąČ▌dŪ·▄ē═©│Ż×ķ┐šķg┬▌ą²ŠĆŻ¼╚ńė├é„ĮyĘĮĘ©įOėŗŻ¼▒žĒÜ═©▀^╬’└ĒśėÖCüĒ“×ūCŲõįOėŗĘĮ░ĖĄ─┐╔ąąąįŻ¼ī¦ų┬įOėŗ▀^│╠┬■ķLŪę┘Mė├▌^Ė▀ĪŻ└¹ė├╠ōöMśėÖC╝╝ągī”ĄV▄ćĄ─▀\äė▀^│╠║═┴”īW╠žąį▀Mąąėŗ╦ŃÖCĘ┬šµŻ¼┴”Ū¾½@Ą├ØMūŃīŹļHąĶꬥ─ąČ▌dŽĄĮyŻ¼ī”ė┌╠ßĖ▀ĄV▄ćčą░lą¦┬╩ĪóĮĄĄ═čą░l’LļUĪó┐žųŲįOėŗ│╔▒ŠĄ╚Š▀ėą▓╗┐╔╠µ┤·Ą─ĘeśOū„ė├ĪŻ
1 ╣żū„įŁ└Ē
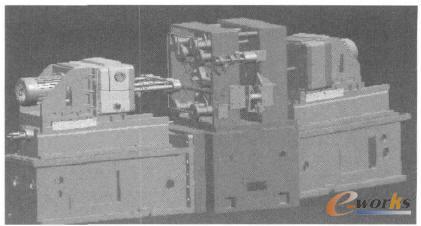
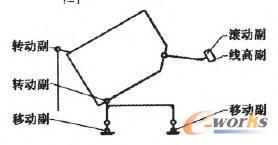
╚ńłD1╦∙╩ŠŻ¼2m3å╬é╚Ū·▄ēé╚ąČ╩ĮĄV▄ćĄ─╣żū„įŁ└Ē╩Ūį┌ÖC▄ćĀ┐ę²Ž┬Ż¼ĄV▄ćčž▄ēĄ└Ž“Ū░▀\ąąŻ¼ąČ▌d═ŲŚU═©▀^Ū·▄ē▀^Č╔čbų├ĢrŻ¼╩ūŽ╚╩╣ąČ▌d═ŲŚUĄ─ķgŽČŽ¹│²Ż¼«ö═ŲŚU═©▀^Ū·▄ēūįąČČ╬ĢrŻ¼▄ćĹķ_╩╝└@Ąū▒P╔ŽĄ─▐D▌S╗ž▐DŻ╗┼c┤╦═¼ĢrŻ¼▄ćĹķTĄ─µiŃ^į┌Ųõķ_ŲÖCśŗ═”ŚUĄ─ū„ė├Ž┬ķ_╩╝╗ž▐DŻ¼«ö▄ćĹāA▐D▀_ĄĮę╗Č©Ą─ĮŪČ╚ĢrŻ¼µiŃ^┼cé╚ķT├ōķ_Ż¼é╚ķTķ_Ų▓óąČĄVĪŻ
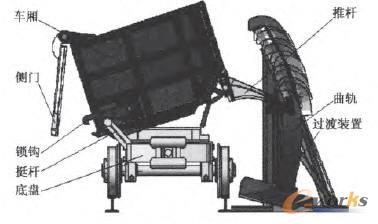
łD1 å╬é╚Ū·▄ēé╚ąČ╩ĮĄV▄ć
ļSų°ĄV▄掓Ū░▀\ąąŻ¼═ŲŚU▒╗Ū·▄ēĄ─▒Ē├µų▓Į╠¦Ė▀Ż¼▄ćĹ└^└mĘŁ▐DŻ¼ąČ▌dĮŪ▓╗öÓį÷┤¾ĄĮūŅ┤¾Ż¼▓ó▒Ż│ųę╗Č╬ŠÓļxŻ¼╩╣ĄV╩»āA×aČ°│÷Ż╗╚╗║¾Ż¼═ŲŚU▀M╚ļŪ·▄ēĄ─Å═╬╗Č╬Ż¼ĄV▄ćĖ„▓┐äėū„┼cąČ▌dĢräé║├ŽÓĘ┤Ż¼é╚ķTį┌ūįųžū„ė├Ž┬ųØuĻPķ]Ż¼µiŃ^Å═╬╗Ń^ūĪé╚ķTŻ¼═Ļ│╔ę╗┤╬ąČ▌d▀^│╠ĪŻė╔ė┌ąČ▌d▀^│╠ųąĄV▄ć╩▄┴”ĀŅørÅ═ļsŻ¼š¹éĆĄV▄ćę¬│ą╩▄▌^┤¾Ą─ø_ō¶▌d║╔Ż¼ę“┤╦ąČ▌d─▄ʱĒś└¹▀Mąąį┌║▄┤¾│╠Č╚╔Ž╚ĪøQė┌Ū·▄ēĄ─ą╬ĀŅ║══ŲŚUĄ─ą╬ĀŅ╬╗ų├│▀┤ńĪŻŪ·▄ēą╬ĀŅĄ─įOėŗ╝░═ŲŚUą╬ĀŅ╬╗ų├│▀┤ńĄ─║Ž└Ē┼cʱŻ¼īóų▒ĮėĻPŽĄĄĮĄV▄ćąČ▌dĄ─ŲĮĘĆąį║═╩╣ė├ē█├³ĪŻ
2 ĄV▄ćįOėŗ
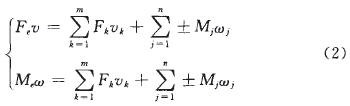
ĄV▄ćĄ─═ŲŚUį┌Ū·▄ē╔Ž▀\ąąŻ¼Ųõ▀\ąąĄ─ŲĮĘĆąįų„ę¬ė╔Ū·▄ēĄ─═Ōą╬øQČ©ĪŻ×ķ▒ŻūC═ŲŚU▓╗į┌Ū·▄ē╔Ž░l╔·é╚╗¼Ż¼└Ēšō╔Žę¬Ū¾Ū·▄ēĄ─╣żū„▒Ē├µæ¬║══ŲŚUį┌ąČ▌dĄ─╚╬║╬Ģr┐╠Č╝▒Ż│ų┤╣ų▒Ż¼▓╗«a╔·╚╬║╬ĖĮ╝ėÅØŠžŻ╗ę“┤╦Ż¼Ū·▄ēįOėŗ’@Ą├ė╚×ķųžę¬Ż¼Ųõą╬ĀŅĄ─║├ē─ų▒ĮėĻPŽĄĄĮĄV▄ć╣żū„Ģr╩Ūʱ«a╔·ø_ō¶Ż¼╩Ūʱ░▓╚½┐╔┐┐ĪŻ2m3å╬é╚ūįąČ╩ĮĄV▄ćĄ─Ū·▄ēŪ·ŠĆ╝░Ū·▄ē╚ńłD2╦∙╩ŠĪŻ
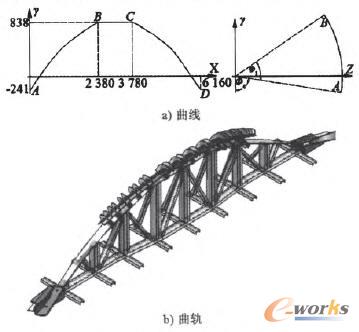
łD2 Ū·▄ēŪ·ŠĆ╝░Ū·▄ē
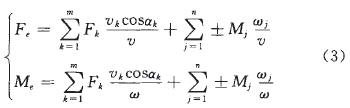
═ŲŚUčbų├Ą─ą╬ĀŅ│▀┤ń╝░Ųõį┌▄ć¾w╔ŽĄ─░▓čb╬╗ų├į┌ĄV▄ćąČ▌d▀^│╠ųąš╝ėąųžę¬Ą─Ąž╬╗Ż¼═ŲŚUčbų├įOėŗæ¬ūóęŌęįŽ┬2ĘNŪķørŻ║1)═ŲŚUØL▌åĄ─╗ž▐D▌SŠĆ▒žĒÜ╩╝ĮK┼c▄ćĹąČ▌d╗ž▐D▌SŽÓĮ╗Ż¼▀@śė┐╔ęį▒ŻūCąČ▌d▀^│╠ųą═ŲŚUØL▌å├µ╩╝ĮK┼cŪ·▄ē├µ┤╣ų▒Ż¼Ūę▓╗«a╔·é╚╗¼Ż╗2)═ŲŚU▌SĄ─░▓čb╬╗ų├▒žĒÜ┼c▄ćĹąČ▌d╗ž▐D▌S╬╗ų├ĪóŪ·▄ēą╬ĀŅ╝░═ŲŚUÄū║╬ą╬ĀŅŽÓŲź┼õŻ¼▀@śė╝╚─▄║▄║├Ąž═Ļ│╔ąČĄVŻ¼ėų─▄╩╣Ųõ▓╗┼cŪ·▄ē║═ĒöŚUčbų├ŽÓĖ╔╔µĪŻ╚ńłD3╦∙╩Š×ķę╗Ąõą═Ą─ĄV▄ć═ŲŚUčbų├ĪŻ
łD3 ═ŲŚUčbų├
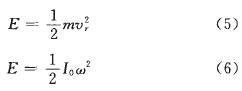
2m3å╬é╚ūįąČ╩ĮĄV▄ćĄ─Ąū▒P╚ńłD4╦∙╩ŠŻ¼╦³╩Ūš¹éĆ▄ć¾w║═ĄV╬’Ą─│ą▌dĮYśŗ║═ū▀ąąÖCśŗŻ¼ŲõįOėŗŠ½Č╚øQČ©┴╦ĄV▄ćĄ─š¹¾w╣”─▄Ż╗ę“┤╦Ż¼▒žĒÜī”Ųõ╝ėęįšJšµūą╝ÜĄ─蹊┐ĪŻ

łD4 Ąū▒P
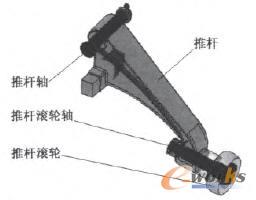
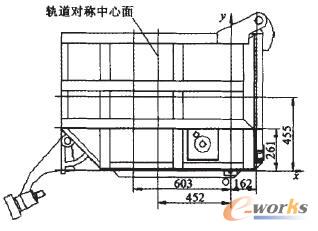
ĄV▄ć▄ćĹ╚ńłD5╦∙╩ŠŻ¼╩ŪĄV╬’│ą▌d╚▌Ų„Ż¼▄ćĹé╚ķT╚ńłD6╦∙╩ŠŻ¼▄ćĹ╝░é╚ķTŠ∙ė╔¤ß▄łą═õō║═õō░ÕŲ┤║ĖČ°│╔Ż¼╦³éāų«ķgĄ─▀BĮė╝╚ę¬▒ŻūCąČ▌dĢré╚ķTūŅ┤¾Ž▐Č╚Ą─ķ_ŲŻ¼ėųę¬▒ŻūC▀\▌öĢrĄ─┐╔┐┐ķ]║ŽĪŻ

łD5 ▄ćĹ

łD6 é╚ķT
3 ĄV▄ćūįė╔Č╚ėŗ╦Ń
į┌═ŲŚUčbų├▀M╚ļŪ·▄ēąČ▌dČ╬ĢrŻ¼ĄV▄接Įy┐╔ęį║å╗»×ķ╚ńłD7╦∙╩ŠĄ─▀BŚUÖCśŗŻ¼ę¬╩╣ŲõŠ▀ėą┤_Č©Ą─▀\äėŻ¼įŁäė╝■Ą─öĄ─┐▒žĒÜĄ╚ė┌ÖCśŗĄ─ūįė╔Č╚öĄĪŻĄV▄ćąČ▌dī┘┐šķgÖCśŗå¢Ņ}Ż¼Ųõūįė╔Č╚Ą─ėŗ╦ŃąĶę¬┐╝æ]Ė„śŗ╝■Ą─6éĆūįė╔Č╚ĪŻ┐šķg▀\äėĖ▒ų„ę¬░³└©ó±╝ēĖ▒Ī½ó§╝ēĖ▒Ż¼Ųõ╦∙╠ß╣®Ą─╝s╩°öĄ─┐Ęųäe╩Ū1Ī½5ĪŻįO┐šķgÖCśŗ╣▓ėąnéĆ╗Ņäėśŗ╝■Ż¼p1éĆó±╝ēĖ▒Ż¼p2éĆó“╝ēĖ▒Ż¼p3éĆó¾╝ēĖ▒Ż¼p4éĆó¶╝ēĖ▒║═P5éĆó§╝ēĖ▒Ż¼ätÖCśŗĄ─ūįė╔Č╚┐╔▒Ē╩Š×ķŻ║
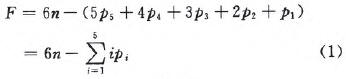
łD7 ĄV▄ćĖ„śŗ╝■ūįė╔Č╚łD
═ŲŚUčbų├ųąØL▌åĄ─ØLäėĖ▒ī┘ė┌╠ō╝s╩°Ż¼┐╔ęį║÷┬įŻ¼Č°Ąū▒P┼cõō▄ēķgĄ─2éĆęŲäėĖ▒Š▀ėąŽÓ═¼Ą─▀\äėęÄ┬╔Ż¼┐╔ęį┐┤ū„╩Ūę╗éĆęŲäėĖ▒ĪŻ┤·╚ļ╩Į1┐╔Ą├Ż║

┐╔ęŖŻ¼š¹éĆĄV▄ćĄ─ūįė╔Č╚×ķ1Ż¼ŽĄĮyŠ▀ėą┤_Č©Ą─▀\äėęÄ┬╔ĪŻ
«ö═ŲŚU▀M╚ļŪ·▄ē▀^Č╔Č╬ĢrŻ¼═ŲŚU┼c▄ćĹķgą╬│╔▐DäėĖ▒ĪŻ«ö═ŲŚU═©▀^Ū·▄ē▀^Č╔Č╬▀M╚ļąČ▌dČ╬║¾Ż¼╔Ž╩÷▐DäėĖ▒Ž¹╩¦Ż¼┤╦Ģrų╗ąĶ┐╝æ]ĄV▄ć▀M╚ļąČ▌dČ╬Ģr╩Ūʱī”▄ć¾w«a╔·ø_ō¶ĪŻ
4 ┴”īWĘĮ│╠Į©┴ó
╚ńłD7╦∙╩Š×ķå╬é╚Ū·▄ēūįąČ╩ĮĄV▄ćČÓäé¾wäė┴”īW─Żą═Ż¼į┌ī”Ųõ▀MąąĘų╬÷ėŗ╦ŃĢrŻ¼┐╔▓╗┐╝æ]śŗ╝■Ą─ÅŚąįūāą╬Ż¼ĄV▄ć▀\äė▀^│╠ųąŻ¼ĒÜ▀Mąą╚ńŽ┬╝┘įOŻ║1Ż®ŽĄĮyśŗ╝■Č╝┐┤ū„äé¾wŻ¼▓╗┐╝æ]ŲõÅŚąįūāą╬Ż╗2Ż®▀\äėĖ▒ųą¤oķgŽČ║═─”▓┴Ż╗3Ż®śŗ╝■Ą─▀\äė╦┘Č╚▓╗Ė▀ĪŻ
░čśŗ╝■╦∙╩▄═Ō┴”╝░┘|┴┐▐D╗»ĄĮĄ╚ą¦śŗ╝■╔ŽŻ¼╩╣Ųõ▀\äė┼cÖCśŗĄ─īŹļH▀\äėę╗ų┬Ż¼▓óĮ©┴óĄ╚ą¦śŗ╝■Ą─äė┴”īW─Żą═Ż¼ō■┤╦Ż¼īóÅ═ļsŽĄĮyĄ─äė┴”īWå¢Ņ}┐┤ū„╩ŪĄ╚ą¦śŗ╝■Ą─äė┴”īWå¢Ņ}üĒŪ¾ĮŌĪŻ
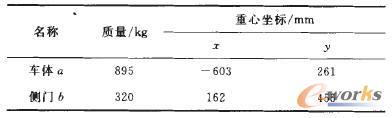
4.1 Ą╚ą¦┴”┼cĄ╚ą¦┴”Šž
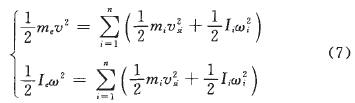
Ė∙ō■╣”─▄įŁ└ĒŻ¼Ą╚ą¦┴”║═Ą╚ą¦┴”Šž╦∙ū÷╣”┼c═Ō┴”╗“═Ō┴”Šž╦∙ū÷╣”æ¬įōŽÓĄ╚ĪŻįOFk(k=1Ż¼2Ż¼…Ż¼m)║═Mj(j=1Ż¼2Ż¼…Ż¼n)Ęųäe×ķū„ė├į┌ĄV▄接Įy╔ŽĄ─═Ō┴”║══Ō┴”ŠžŻ¼Ė∙ō■Ą╚ą¦┴”Fe║═Ą╚ą¦┴”ŠžMeĄ─╣”┬╩┼cÖCąĄŽĄĮyĄ─┐é╣”┬╩ŽÓĄ╚┐╔Ą├Ż║
╩ĮųąŻ¼ω×ķĄ╚ą¦śŗ╝■Ą─ĮŪ╦┘Č╚Ż╗v×ķĄ╚ą¦śŗ╝■Ą─╦┘Č╚Ż╗vk×ķ═Ō┴”Fkū„ė├³cĄ─╦┘Č╚Ż╗ωj×ķ═Ō┴”ŠžMjū„ė├į┌śŗ╝■Ą─ĮŪ╦┘Č╚ĪŻ
Ė∙ō■╩Į2┐╔Ū¾│÷Fe║═MeĄ─▒Ē▀_╩Į×ķŻ║
╩ĮųąŻ¼αk×ķFk┼cVkĄ─ŖAĮŪĪŻ
Å─╩Į3┐╔ęį┐┤│÷Ż¼Ą╚ą¦┴”║═Ą╚ą¦┴”Šž▓╗āH┼cśŗ╝■╦∙╩▄Ą─═Ō┴”║══Ō┴”ŠžėąĻPŻ¼Č°Ūę▀Ć┼cŲõé„äė▒╚Ż©ωj/vĪóvk/vŻ©╗“ωi/ωĪóvk/ωŻ®ėąĻPĪŻ
4.2 ┘|ą─╝░▐DäėæT┴┐┤_Č©
Ą╚ą¦śŗ╝■╦∙Š▀ėąĄ─┐éäė─▄╩ŪĖ„śŗ╝■Ą─Ęųäė─▄ų«║═Ż¼ę“┤╦Ż¼ū÷┐šķg▀\äėĄ─śŗ╝■╦∙Š▀ėąĄ─äė─▄×ķŻ║

╩ĮųąŻ¼m×ķśŗ╝■Ą─┘|┴┐Ż╗I×ķśŗ╝■ŽÓī”ė┌┘|ą─Ą─▐DäėæT┴┐Ż╗Vr×ķśŗ╝■┘|ą─Ą─╦┘Č╚Ż╗ω×ķśŗ╝■Ą─ĮŪ╦┘Č╚ĪŻ
ī”ė┌ū÷ŲĮäė╗“Č©▌S▐DäėĄ─śŗ╝■Ż¼╩Į4┐╔Ęųäe║å╗»×ķŻ║
╩ĮųąŻ¼Io×ķśŗ╝■ŽÓī”ė┌Ųõ▐D▌SĄ─▐DäėæT┴┐ĪŻ
Ė∙ō■äė─▄ŽÓĄ╚Ą─įŁätŻ¼Ą╚ą¦śŗ╝■Ą─┘|┴┐me║═▐DäėæT┴┐Ieæ¬ØMūŃŻ║
═Ųī¦│÷Ą─Ą╚ą¦śŗ╝■Ą─┘|┴┐me║═▐DäėæT┴┐Ie┐╔▒Ē╩Š×ķŻ║
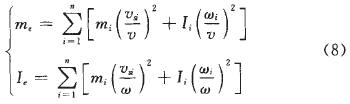
╩ĮųąŻ¼vk×ķĄ┌iéĆśŗ╝■┘|ą─╦┘Č╚Ż╗ωi×ķĄ┌iéĆśŗ╝■ĮŪ╦┘Č╚Ż╗n×ķ╗Ņäėśŗ╝■öĄ┴┐ĪŻ
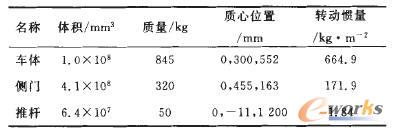
ō■┤╦┐╔┤_Č©ĄV▄接ĮyĄ─┘|ą─╝░▐DäėæT┴┐ĪŻė╔ė┌ėŗ╦Ń▀^│╠║åå╬Č°Ę▒Å═Ż¼ę“┤╦▒Š╬─āHĮo│÷ėŗ╦Ń╦∙Ą├Ą─ĮY╣¹Ż¼Š▀¾wöĄō■ęŖ▒Ē1ĪŻ
▒Ē1 Ė„▓┐╝■Ą─┘|┴┐Ęų▓╝╝░ŽÓĻPöĄō■
4.3 äė┴”īWĘĮ│╠Į©┴ó
╚Īå╬éĆĄV▄ć×ķ蹊┐ī”Ž¾Ż¼ąČ▌d▄ēĄ└ā╚═ŌĄV▄ćĄū▒PĄ─▀\äėęÄ┬╔ŽÓ═¼Ż¼ŪęāHū÷ŲĮäėŻ╗ąČ▌dČ╬║═Å═╬╗Č╬ķgĄ─ų▒ŠĆČ╬ŠÓļx×ķ1.4mŻ╗╣─ą╬═ŲŚUØL▌å║═ąČ▌dŪ·▄ēķg×ķ╣Ō╗¼Įėė|Ż¼Ūęį┌Ųõ╔Žū÷╝āØLäėĪŻ
Ė∙ō■äė┴”īWŲš▒ķĘĮ│╠Ż¼┐╔Ą├│÷ČÓäé¾wŽĄĮyĄ─äė┴”īWĘĮ│╠×ķŻ║

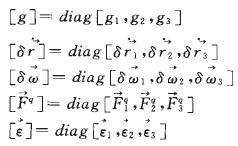
╩ĮųąŻ¼

Mi×ķäé¾wiĄ─┘|┴┐Ż╗[gi]×ķäé¾wiĄ─ųąą─æTąįÅł┴┐Ż╗ri×ķäé¾wiĄ─┘|ą─╩ĖÅĮŻ╗ωi×ķäé¾wiĄ─▐DäėĮŪ╦┘Č╚Ż╗δP×ķŽĄĮyā╚┴”╦∙═Ļ│╔Ą─╠ō╣”┬╩ęį╝░ĮŌ│²╝s╩°║¾Ą─╝s╩°Ę┤┴”╦∙ū÷Ą─╠ō╣”┬╩┐é║═Ż╗Fqi×ķū„ė├į┌äé¾wiĄ─═Ō┴”ų„╩ĖŻ╗M×ķū„ė├į┌äé¾wiĄ─ŽÓī”┘|ą─Ą─ų„ŠžŻ¼ätŲõŠžĻćą╬╩Į×ķŻ║

╩ĮųąŻ¼

5 ĄV▄ćĘĆČ©ąįąŻ║╦
ĄV▄ć▄ćĹ╬┤ĘŁ▐DĢrŻ¼┐╔░č═ŲŚUčbų├Īó▄ćĹ║═ÆņŃ^┐┤ū„š¹¾wŻ¼Č°é╚ķT┐┤ū„╩Ūę╗éĆ▓┐╝■ĪŻŲõųžą─╬╗ų├╚ńłD8╦∙╩ŠŻ¼ū°ś╦ŽĄęŖ▒Ē2ĪŻ
łD8 ĄV▄ćįŁ╩╝ĀŅæBųžą─╬╗ų├
▒Ē2 ĄV▄ć╬┤ĘŁ▐DĢrĄ─ųžą─ū°ś╦
«ö▄ćĹć·└@Ųõ╗ž▐Dųąą─▐D▀^40°ĢrŻ¼▄ćĹé╚ķT┤“ķ_Ż¼═©▀^ū°ś╦▐DōQŪ¾Ą├▄ćĹį┌ūŅ┤¾ĘŁ▐DĮŪČ╚ĢrĄV▄ćĄ─ųžą─ū°ś╦ĪŻ
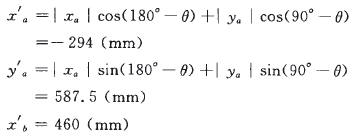
š¹éĆ▄ćĹį┌╗ž▐D40°ĢrĄ─ųžą─ÖMū°ś╦×ķŻ║
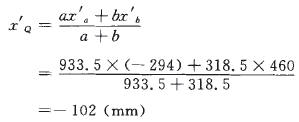
╗ž▐Dųąą─ŠÓ2Śl▄ēĄ└ī”ĘQųąą─├µĄ─╦«ŲĮŠÓļx╩Ū452mmŻ¼▄ēŠÓ╩Ū973.5mmŻ¼ät973.5/2-(452-102)=136.75(mm)ĪŻė╔┤╦┐╔ęŖŻ¼«ö▄ćÄ¹ĘŁ▐D40°ĢrŻ¼š¹éĆĄV▄ćŠÓėę▀ģ▄ēĄ└ā╚é╚Ą─ŠÓļx×ķ136.75mmŻ¼ĄV▄ć▓╗Ģ■«a╔·āAĘŁŻ╗ę“┤╦Ż¼ĄV▄ć╩ŪĘĆČ©Ą─ĪŻ
6 ĮYšZ
ęįå╬é╚ūįąČ╩ĮĄV▄ć×ķ蹊┐ī”Ž¾Ż¼ī”Ųõąį─▄▀Mąą┴╦└ĒšōĘų╬÷Ż¼ŠC║Ž▀\ė├╚²ŠSCAD▄ø╝■Ż¼Į©┴óŲõ╠ōöMśėÖC─Żą═Ż¼╚╗║¾▀Mąą┴╦▀\äėĘų╬÷ĪŻ▀\ė├╠ōöMśėÖC╝╝ągī”å╬é╚Ū·▄ēūįąČ╩ĮĄV▄ć▀Mąą┴╦čą░lŻ¼Į©┴ó┴╦Ųõ╠ōöMśėÖC─Żą═Ż¼×ķ║¾└mĄ─Ęų╬÷ĄņČ©┴╦╗∙ĄAĪŻčąŠ┐┴╦įōĄV▄ćĄ─ų„ę¬▓┐╝■╝░Ė„▓┐ĘųĄ─ū„ė├Ż¼▓óī”ŲõĻPµIĄ─┴Ń▓┐╝■▀Mąą┴╦Ęų╬÷ĪŻ╗∙ė┌å╬é╚Ū·▄ēūįąČ╩ĮĄV▄ćĄ─ų„ę¬╣żørŻ¼Į©┴ó┴╦Ųõ┴”īWĘĮ│╠ĪŻī”įōą═ĄV▄ćĄ─ĘĆČ©ąį▀Mąą┴╦ąŻ║╦ĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://m.kaqidy.com/
▒Š╬─ś╦Ņ}Ż║å╬é╚ūįąČ╩ĮĄV▄ć蹊┐
▒Š╬─ŠWųĘŻ║http://m.kaqidy.com/html/solutions/14019315154.html